In the fast-paced realm of autonomous driving, clarity and standardization are paramount. The Society of Automotive Engineers (SAE) addresses this need through the SAE J3016 standard, offering precise definitions and a structured framework for understanding various levels of driving automation. At the core of this standard lies the concept of the Dynamic Driving Task (DDT), which encapsulates the technical intricacies of autonomous driving. In this blog post, we will delve deeper into SAE J3016, exploring the technical details of Lateral Control, Longitudinal Control, and Object and Event Detection and Response (OEDR).
1. Lateral Control: Mastering the Steering
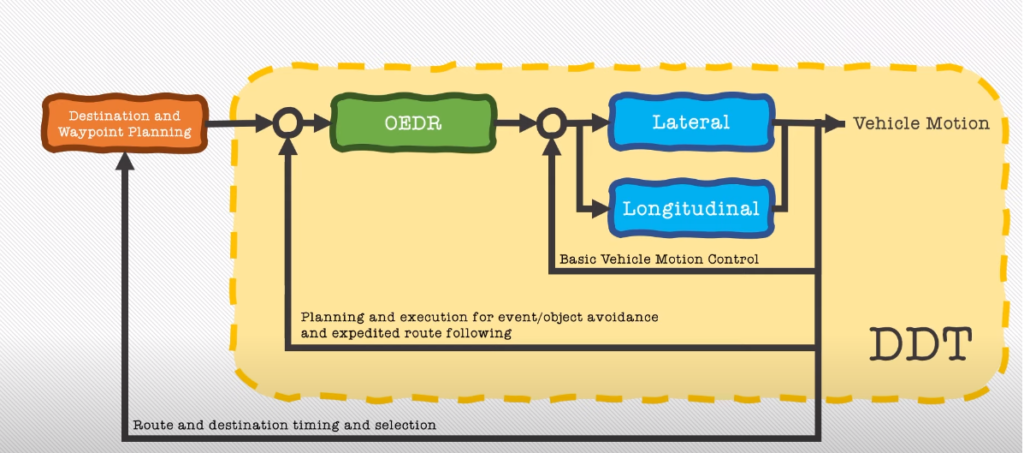
Lateral control refers to the vehicle’s ability to maintain its position within a lane, ensuring accurate steering and maneuvering. In autonomous driving systems, advanced sensors, such as cameras and LiDAR, detect lane markings and surrounding objects. Machine learning algorithms process this data to make real-time decisions, adjusting the steering angle to keep the vehicle safely within its lane. Complex algorithms, including path planning and control theory, come into play, enabling the vehicle to navigate bends, handle lane changes, and avoid obstacles with precision.
2. Longitudinal Control: Managing Speed and Distance
Longitudinal control focuses on managing the vehicle’s speed, acceleration, and deceleration. Adaptive cruise control (ACC) systems, a common feature in modern vehicles, serve as a foundation for longitudinal control in autonomous driving. These systems utilize sensors, such as radar and cameras, to monitor the traffic flow. By calculating the distance and relative speed of nearby vehicles, the autonomous vehicle can adjust its speed accordingly, maintaining a safe following distance. Advanced algorithms consider various factors, including traffic patterns, road conditions, and the vehicle’s own capabilities, ensuring smooth acceleration and braking maneuvers.
3. Object and Event Detection and Response (OEDR): Anticipating the Unexpected
OEDR is a critical aspect of autonomous driving, focusing on detecting and responding to objects, events, and road conditions in real time. State-of-the-art sensors, including radar, LiDAR, cameras, and ultrasonic devices, capture the vehicle’s surroundings with remarkable precision. Deep learning algorithms process this data, enabling the system to recognize pedestrians, cyclists, other vehicles, traffic signs, and complex scenarios like construction zones or sudden road closures. The vehicle’s response may involve trajectory planning, emergency braking, or evasive maneuvers, ensuring the safety of both occupants and other road users.
The above concepts are well explained by Mahmood Hikmet and you can watch them on his YouTube Channel